Abstract
- この論文では、自動制御ロボットの制御方法として fuzzy logic motion control と stereo vision based path-planning module を使用した。
- どんな未知な環境でも制御できる必要がある。
- ロボットの目的はターゲットまでに到達することであるが、その移動の過程で予期しない障害物が出現してもうまくかわしてくれる必要がある。
- この論文のオリジナルな要素として、危機的な状況 ( 障害物で進路が邪魔されている状況 ) で fuzzy rules を使用するだけでなく、stereo vision camera を使用した。
Introduction(1/2)
- Mobile robot application は日々進化をしており、様々なサービスでも使用されるようになっている。これらは予め決められた行動を遂行するようにチューニングされている。
- しかし、これらの robot は、想定外の事柄や、様々な環境下に置かれたとしても、 Task が実行される必要がある。
- unstructured environment : その環境がどういう地形で、障害物がどこにあるのかわからない環境
- dynamic environment : 障害物が動いてたりと、ロボットの周りが変化するような環境
- 障害物を避ける手法は、たくさんの論文が出ており、今でも新しい手法がつくられる。 それらに応じた fuzzy logic control がすでに存在する。
- 様々な手法によって fuzzy logic control が成功を収めているが、fuzzy logic controller がいかに効果的に If-Then ルールにのっとって最適化するという問題が残っている。
Introduction(2/2)
- robot には、ultra sonic sensors (US sensor) を使用している。
- US sensor は 障害物までの距離、壁との関係、vision system をアシストするための機能が付いている。
- この論文では、ロボットが障害物を避けるときの問題を階層構造として取り扱った。
Behavioral-based fuzzy control architecture
Fuzzy control は 3つのステップがある。
-
Fuzzification
変数を数値で扱うのではなく、アバウトな値として取る。
例) distance = {Zero, Near, Far} -
Inference engine
IF_THEN ルールにのっとって、input Data、output Dataを定義する。 -
Defuzzification
実数値をアバウトな値に変換する。
Behavior-based design
- robot のセンサーがそれぞれの振る舞いを決定する。
- ゴールに到達するまでの振る舞いと、壁との位置関係における振る舞いを合成する。
- もし障害物があって、それを避けるような振る舞いが起こればそれが最優先される。

Path following behavior(1/3)
ロボットがゴールに到達するまでの振る舞いに関して説明している

- Distance : 目標までの距離
- Orientation : 目標に対するロボットの向きの角度
-
Velocity : ロボットの速さ
vl : Velocity of Left wheel
vr : Velocity of Right wheel
Path following behavior(2/3)

- どのように変数をとっているのかを表しているグラフ。
- 例えば、distance が 200 - 300 のとき、NF(Near-Far)となる。
Path following behavior(3/3)
ゴールまでの距離とゴールに対するロボットの向きの角度によるホイールの対応表

例 : If (d is M Λ α is PM) Then (vl is H Λ vr is S)
ゴールまでの距離が M で、ゴールに対するロボットの向きが PM の場合、vl は H 、vr は S の速度で動く。
Obstacle avoidance behavior 1st layer(1/4)
- US sensor は 3セット一列横並びで並んでいる。
- 並んでいるそれぞれのセンサーから障害物がどのぐらい離れているか、その障害物のある角度、camera にて避けるときの振る舞いが決定される。

Obstacle avoidance behavior 1st layer(2/4)
- US sensor は 3セット一列横並びで並んでいる。
- 並んでいるそれぞれのセンサーから障害物がどのぐらい離れているか、その障害物のある角度、camera にて避けるときの振る舞いが決定される。
- 目の前に障害物が現れたとき、どういう避け方をするか決定される.


Obstacle avoidance behavior 1st layer(3/4)


Obstacle avoidance behavior 1st layer(4/4)


- 障害物と、それぞれの3つのセンサーからの距離と角度に対応する振る舞い。
Obstacle avoidance behavior 2nd layer

- 1st layer で出力された結果に基いて、vl、vr の動作が決定される。
- 3rd layer では 2nd layer で決定された振る舞いをホイールに伝える。
Direct Visual Controlling
- 2nd Layer で XX (未定義) の時には、bumblebee というステレオカメラを使用して周りの状況をつかむ。 http://www.apherrecords.com/
- ROI : Region Of Interest 着目領域 (要するにウィンドウ)
- RANSAC : パラメータ推定のアルゴリズム
-
SLAM : Simultaneous Localization and Mapping
画像解析によって、障害物の情報や避けるための情報を解析する。

Experimental results(1/7)


- スムーズに目標に向かって最適な経路をたどっていることがわかる
Experimental results(2/7)

- Cul-de-Sac にハマる前までは、FLMC(Fuzzy-Logic motion controller)で制御されていた。
- Cul-de-Sac にハマった後では、SVPPM(stereovision based path-planning module)で制御している。
Experimental results(3/7)

Experimental results(4/7)

Experimental results(5/7)

他の論文の fast_SLAM との比較
Experimental results(6/7)
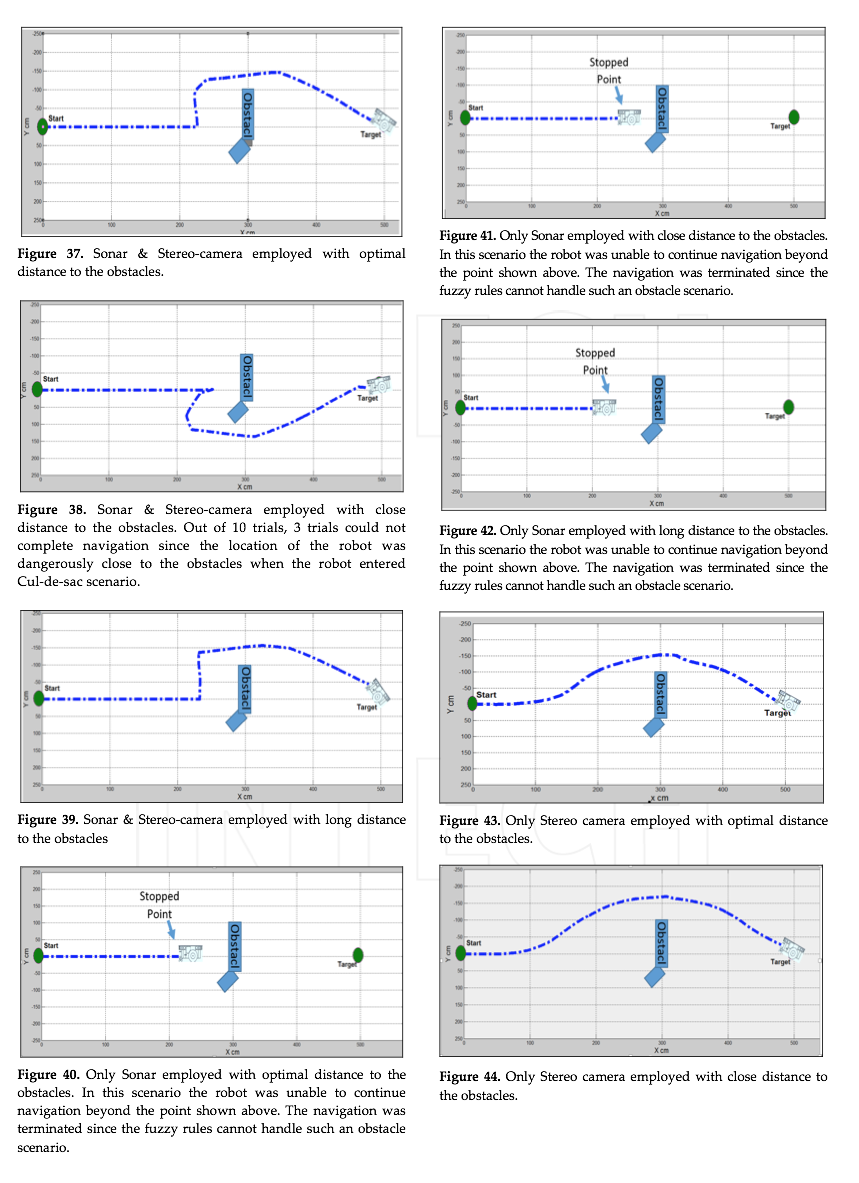
Obstacl と Robot の位置関係による動作の違いと、使用するデバイスによる動作の違い。
Experimental results(7/7)

Conclusion
- この論文では、Fuzzy control を使ったロボット制御を実装した。
- 複雑な環境下における自動制御の能力が、hierarchical architecture based on fuzzy reasoning によって上昇した。
- Fuzzy control だけでなく、ステレオカメラを使用することによって、cul-de-sac のような状況を assist できるようにした。